Simultaneous Localization Mapping: Manufactures, Types, Features & Applications
Simultaneous Localization and Mapping (SLAM) is a technique used in robotics, computer vision, and augmented reality to create maps of unknown environments while simultaneously estimating the robot’s or camera’s location within that environment. It is an important technology for robotics and autonomous systems as it enables them to navigate and operate in unfamiliar environments.
The SLAM algorithm uses sensor data such as LIDAR, depth sensors, and cameras to create a 3D map of the environment and estimate the robot’s location in real time. The map is built incrementally as the robot moves through the environment and the sensor data is continuously integrated and processed.
The SLAM algorithm has many applications, including in autonomous cars, drones, and mobile robots. It also has applications in augmented reality, where SLAM can be used to create a 3D model of the user’s environment, allowing virtual objects to be placed and interacted with in real time.
SLAM is a complex and challenging problem, as it requires real-time processing of large amounts of data, accurate sensor measurements, and robust algorithms for estimating location and mapping the environment. However, advancements in sensor technology and machine learning algorithms have made SLAM more accurate and reliable, making it a key technology for the development of next-generation autonomous systems and immersive experiences.
Simultaneous Localization and Mapping (SLAM)
How to Do Simultaneous Localization and Mapping Work?
SLAM works by using a combination of sensor data, such as laser range finders, cameras, and inertial measurement units (IMUs), to estimate the robot or camera’s motion through the environment and to build a map of the environment at the same time.
The process involves extracting features from the sensor data and matching them to previously seen features on the map. The robot or camera then uses this information to estimate its current position and update the map as it moves through the environment.
The SLAM process typically involves four steps:
- Feature extraction: The robot or camera collects sensor data and extracts features from it, such as visual landmarks or 3D points.
- Feature matching: The robot or camera matches the extracted features to previously seen features on the map.
- Motion estimation: The robot or camera uses the matched features to estimate its motion through the environment.
- Map update: The robot or camera updates the map with the new information obtained from the sensor data.
SLAM algorithms can be divided into two categories: filter-based methods and graph-based methods. Filter-based methods use a probabilistic filter, such as an Extended Kalman Filter or a Particle Filter, to estimate the robot or camera’s position and update the map. Graph-based methods use a graph structure to represent the environment and estimate the robot or camera’s position and the map at the same time.
Check out the latest products on SLAM
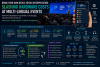
Types of Simultaneous Localization and Mapping
There are several different types of Simultaneous Localization and Mapping (SLAM) techniques used in robotics, computer vision, and augmented reality. Here are some of the most common types:
- EKF-SLAM: Extended Kalman Filter (EKF) SLAM is a popular technique for estimating the robot’s location and building a map of the environment. It uses an EKF algorithm to fuse the sensor measurements and estimate the robot’s pose and the map.
- FastSLAM: FastSLAM is a particle filter-based approach that uses a set of particles to estimate the robot’s pose and the map. It can handle non-linear models and is computationally efficient.
- Graph-based SLAM: Graph-based SLAM represents the map as a graph, where the nodes are the robot’s poses and the edges are the measurements between the poses. It uses optimization algorithms such as least squares to estimate the robot’s pose and the map.
- ORB-SLAM: Oriented FAST and Rotated BRIEF (ORB) SLAM is a feature-based approach that uses a set of visual features to estimate the robot’s pose and the map. It is particularly useful in environments with low texture and high-dynamic range.
- RGB-D SLAM: It uses both color (RGB) and depth (D) information from a camera to estimate the robot’s pose and the map. It is particularly useful in indoor environments where LIDAR is not available.
Each SLAM method has benefits and drawbacks, and it is best suited for particular applications and environments. A robotic or augmented reality system must use the proper SLAM technique to be successful.
Check out the latest Top trending VIdeo on SLAM
SLAM Robot Mapping – Computerphile:
How Simultaneous Localization Mapping is Connected to 3D Projection
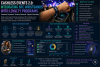
Simultaneous localization and mapping (SLAM) and 3D projection are two different technologies that can work together to create immersive and interactive experiences.
SLAM is a technique used in robotics and computer vision to create maps of unknown environments while simultaneously estimating the robot’s or camera’s location within that environment. 3D projection, on the other hand, is a technique for displaying 3D images or video onto a surface using projectors.
When these two technologies are combined, they can create highly immersive and interactive experiences in augmented reality applications. For example, a SLAM-based augmented reality system could create a virtual 3D model of a room or space, which could then be projected onto the walls or other surfaces of the real environment using 3D projection technology. Users could then use specialized controllers or other input devices to interact with the virtual objects and navigate the virtual environment.
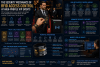
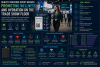
As it enables them to practice complex procedures in a secure and controlled environment, this SLAM and 3D projection technology combination is especially helpful in training simulations for military and medical personnel. Exhibits for museums and other public spaces can also be made using it that are interesting and interactive.
Overall, the integration of SLAM and 3D projection technology holds the promise of revolutionizing how we engage with digital content in physical spaces and opening up new possibilities for immersive and interactive experiences.
FAQs of Simultaneous Localization Mapping
Q1: How accurate is SLAM?
Ans: The accuracy of SLAM depends on the quality of the sensor data and the algorithm used. In ideal conditions, SLAM can achieve sub-centimeter accuracy, but in practice, factors like sensor noise and environmental complexity can affect the accuracy.
Q2: What is the difference between visual SLAM and lidar SLAM?
Ans: Lidar SLAM uses laser range finders to measure the distance to objects in the environment, while visual SLAM uses cameras to extract visual features from the environment.
Q3. What sensors are commonly used for SLAM?
Ans. The sensors commonly used for SLAM include laser rangefinders, cameras, and inertial measurement units (IMUs). The choice of the sensor depends on the application and the environment being mapped.